假設直流有刷馬達由輸入電壓(V)到位置輸出(pulses)的轉移函數如下
Assume the following dynamic function stands for transfer function of DC brush motor input voltage (V) to the position output (pulses)
\[ G(s) = \frac{K_m}{s(1+\tau_m s)}, \]
其中 $k_m$ 是穩態增益,$\tau_m$ 是時間常數。
假設相位超前補償器的形式如下:
The form of phase lead controller $C(s)$ is
\[ C(s) = \frac{1+T_zs}{1+\alpha T_z s} \]
我們的目標是利用 $\alpha$ 和 $T_z$ 這兩個參數來調整閉迴路控制系統的迴路增益(Loop Gain) $C(s)G(s)$ 波德圖的零交越點 $\omega_c$ 頻率,以及相位邊限 $\phi_c$ (phase margin)。
設計參數是零交越點 $\omega_c$ 頻率,以及相位邊限 $\phi_c$ (phase margin)。因此先確認相位超前補償器在 $\omega_c$ 頻率處,可以提供多少相位
\[ \phi_m(\omega) = \angle C(j\omega) = tan^{-1}(\omega T_z) - tan^{-1}(\alpha\omega T_z)\]
其中 $\phi_m(\omega)$ 的最大值發生在微分等於 0 的頻率,也就是我們要的零交越點頻率 $\omega_c$。因此
\[ \frac{d\phi_m(\omega)}{d\omega} = \frac{T_z}{1+\omega^2T_z^2} - \frac{\alpha T_z}{1+\alpha^2\omega^2T_z^2} \]
也就是
\[ \frac{T_z}{1+\omega_c^2T_z^2} = \frac{\alpha T_z}{1+\alpha^2\omega_c^2T_z^2} \Rightarrow \alpha^2\omega_c^2T_z^2 - \alpha (1+\omega_c^2T_z^2) + 1 = 0 \Rightarrow (\alpha\omega_c^2T_z^2 - 1)(\alpha - 1) = 0 \]
由於 $\alpha \ne 1$ (否則$C(s)=1$),所以
\[ \alpha = \frac{1}{\omega_c^2T_z^2} \Rightarrow \omega_c = \frac{1}{\sqrt{\alpha}T_z} \]
這時提供的最大相位是
\[ \phi_{max} = \max_{\omega} \phi_m = \phi_m(\omega_c) = tan^{-1}(\frac{1}{\sqrt{\alpha}}) - tan^{-1}(\sqrt{\alpha}) \]
2016年7月31日 星期日
訂閱:
意見 (Atom)
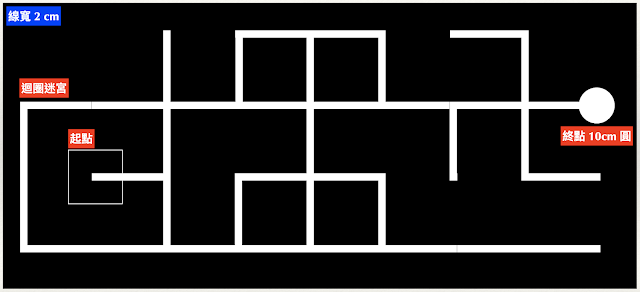
迴圈線迷宮(looped line maze)的搜尋與路徑簡化
迴圈線迷宮(如下圖),專指一個由直交線段組成的迷宮中,包含「迴圈」的路徑。在每年教育部主辦的「 電腦鼠暨智慧輪型機器人競賽 」中,屬於高中職與大專組的「 線迷宮鼠 」競賽活動。規則請參考以下連結 https://sites.google.com/gm.lhu.edu.tw/20...
-
 這是一篇網路上可以參考的文章。 First Order Digital Filters - An Audio Cookbook 這一個數位濾波器的數學式是以下的樣子 (直流增益值為 1) \[ y_n = ay_{n-1} + (1-a)u_n \] 其中 $...
這是一篇網路上可以參考的文章。 First Order Digital Filters - An Audio Cookbook 這一個數位濾波器的數學式是以下的樣子 (直流增益值為 1) \[ y_n = ay_{n-1} + (1-a)u_n \] 其中 $... -
 這是一個實際處理數位信號的例子,我覺得應該有助於整合上課學習到的概念。 左上角的藍色波形,是學生錄製的人聲 DO。 右上角是原始聲音的頻譜分析,以及 6 階 butterworth 低通濾波器的增益頻譜圖形。 左下角是將原始信號經過 6 階 butterwo...
這是一個實際處理數位信號的例子,我覺得應該有助於整合上課學習到的概念。 左上角的藍色波形,是學生錄製的人聲 DO。 右上角是原始聲音的頻譜分析,以及 6 階 butterworth 低通濾波器的增益頻譜圖形。 左下角是將原始信號經過 6 階 butterwo... -
 這一篇是要配合鑑別出電腦鼠的系統特性時(直走或旋轉的動態),說明如何設計「速度回授控制器」的文章。 假設電腦鼠的系統特性如下,輸入是 PWM 數值,輸出是直線或角速度: \( G(s) = \frac{K_m}{\tau_ms+1} \) 其中 $s...
這一篇是要配合鑑別出電腦鼠的系統特性時(直走或旋轉的動態),說明如何設計「速度回授控制器」的文章。 假設電腦鼠的系統特性如下,輸入是 PWM 數值,輸出是直線或角速度: \( G(s) = \frac{K_m}{\tau_ms+1} \) 其中 $s...