2017年12月24日 星期日
PD 控制的數位化設計
我們希望針對電腦鼠 PD 控制器的「數位化」做一些討論。
在 Peter 的文章 (Characterising the drive system on the micromouse) 中提到,電腦鼠的直走或旋轉運動,可以利用實驗資料找出對應的動態系統,還有對應的參數 $\tau_m$ 和 $K_m$
\[
G(s) = \frac{K_m}{\tau_ms + 1}
\]
這一篇文章要討論的是 PD 控制器,以及它數位化後的結果。Peter 也有一篇類似的文章 Designing the motor controller 。整體的系統架構是
\[
e(s) -> K_p+K_ds -> \frac{K_m}{\tau_ms + 1}
\]
其中 $e(s)$ 代表命令與位置輸出之間的誤差。
$G(s)$ 的狀態空間表示式是
\[
\dot{x}(t) = Ax(t) + Bu(t), \\
y(t) = Cx(t) \\
A = \begin{bmatrix}
0 & 1 \\
0 & \frac{1}{\tau_m}
\end{bmatrix}
, B = \begin{bmatrix}
0 \\
1
\end{bmatrix}
, C = \begin{bmatrix}
\frac{K_m}{\tau_m} & 0
\end{bmatrix}
\]
$G(s)$ 狀態空間表示式以取樣時間 $\Delta$ 數位化後的結果 $G(z)$ 是
\[
x[n+1] = Fx[n] + Gu[n], \\
y[n] = Hx[n] \\
F = e^{A\Delta}, B =
, C = \begin{bmatrix}
\frac{K_m}{\tau_m} & 0
\end{bmatrix}
\]
訂閱:
意見 (Atom)
迴圈線迷宮(looped line maze)的搜尋與路徑簡化
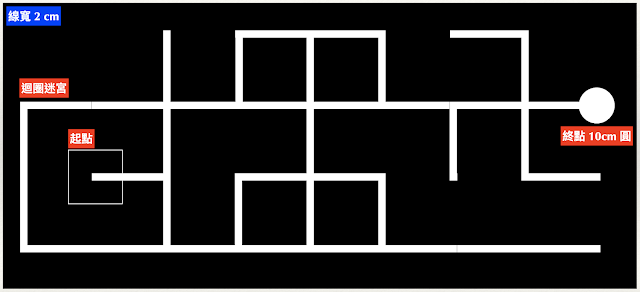
迴圈線迷宮(如下圖),專指一個由直交線段組成的迷宮中,包含「迴圈」的路徑。在每年教育部主辦的「 電腦鼠暨智慧輪型機器人競賽 」中,屬於高中職與大專組的「 線迷宮鼠 」競賽活動。規則請參考以下連結 https://sites.google.com/gm.lhu.edu.tw/20...
-
 這是一篇網路上可以參考的文章。 First Order Digital Filters - An Audio Cookbook 這一個數位濾波器的數學式是以下的樣子 (直流增益值為 1) \[ y_n = ay_{n-1} + (1-a)u_n \] 其中 $...
這是一篇網路上可以參考的文章。 First Order Digital Filters - An Audio Cookbook 這一個數位濾波器的數學式是以下的樣子 (直流增益值為 1) \[ y_n = ay_{n-1} + (1-a)u_n \] 其中 $... -
 這一篇是要配合鑑別出電腦鼠的系統特性時(直走或旋轉的動態),說明如何設計「速度回授控制器」的文章。 假設電腦鼠的系統特性如下,輸入是 PWM 數值,輸出是直線或角速度: \( G(s) = \frac{K_m}{\tau_ms+1} \) 其中 $s...
這一篇是要配合鑑別出電腦鼠的系統特性時(直走或旋轉的動態),說明如何設計「速度回授控制器」的文章。 假設電腦鼠的系統特性如下,輸入是 PWM 數值,輸出是直線或角速度: \( G(s) = \frac{K_m}{\tau_ms+1} \) 其中 $s... -
 這是一個實際處理數位信號的例子,我覺得應該有助於整合上課學習到的概念。 左上角的藍色波形,是學生錄製的人聲 DO。 右上角是原始聲音的頻譜分析,以及 6 階 butterworth 低通濾波器的增益頻譜圖形。 左下角是將原始信號經過 6 階 butterwo...
這是一個實際處理數位信號的例子,我覺得應該有助於整合上課學習到的概念。 左上角的藍色波形,是學生錄製的人聲 DO。 右上角是原始聲音的頻譜分析,以及 6 階 butterworth 低通濾波器的增益頻譜圖形。 左下角是將原始信號經過 6 階 butterwo...